誘導起電力(EMF)は、発電機に電圧を発生させ、変圧器にエネルギーを伝送させ、センサに動きを検出させ、そして多くの電磁システムが運動や変化する磁界を利用可能な信号へ変換することを可能にする電気的効果である。
電磁誘導の核心的な考え方
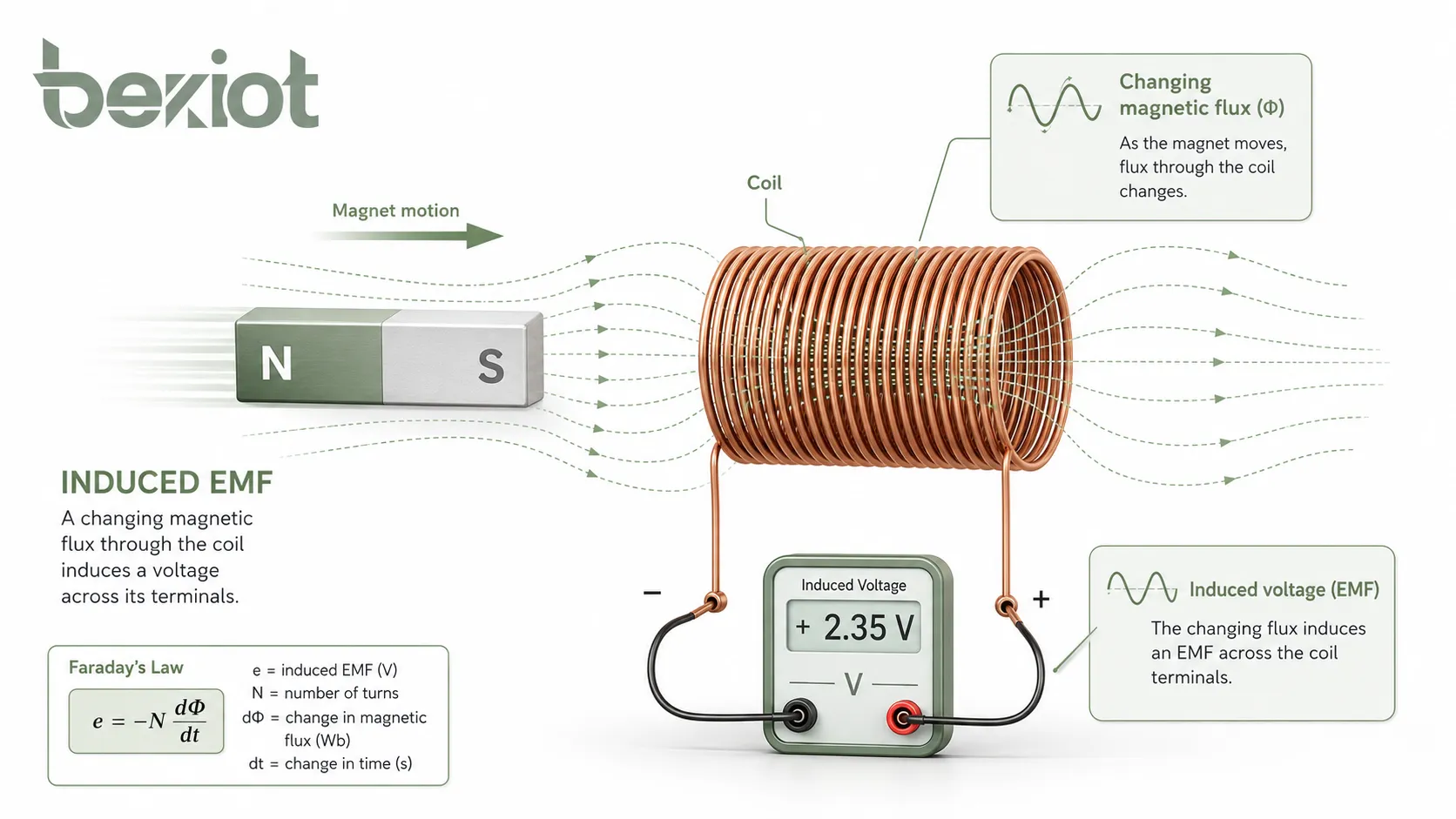
誘導起電力、すなわち誘導電動起電力とは、導体やコイルと鎖交する磁束が変化するときにそれらに生じる電圧のことである。起電力という言葉に含まれる「力」は機械的な力を意味しない。電気工学や物理学において起電力(EMF)は単位電荷あたりに供給されるエネルギーを指し、ボルト(V)で測定される。
基本原理はシンプルである。導体が変化する磁界の中に置かれたり、磁力線を横切るように磁界中を移動したりすると電圧が発生する。回路が閉じていれば、その電圧によって電流を流すことができる。回路が開いていても端子間には電圧が存在しうるが、持続的な電流は流れない。
変化する磁束
磁束とは、ある面を通過する磁界の量を表す。磁界の強さ、面積、角度が変化したり、導体が磁界に対して相対運動したりすると、回路と鎖交する磁束が変化する。
この磁束の変化こそが、誘導起電力が現れる直接の原因である。巻き数の多いコイルでは、変化する磁束が各ターンに鎖交し、その効果が足し合わされるため、より大きな誘導電圧を生み出すことができる。
ファラデーの法則を一言で
ファラデーの法則は、回路に誘導される起電力は磁束鎖交数の時間変化率に比例することを示す。磁束の変化が速いほど高い誘導電圧が発生し、コイルの巻き数が多いほど電圧は高くなる。
だからこそ、発電機では回転するコイルや回転磁界が使われ、変圧器では交流磁束が利用され、誘導型センサでは磁界の変化を通じて動きや位置を検出するのである。
誘導起電力の発生のしくみ
誘導起電力を発生させる一般的な方法は二つある。一つは、静止した導体やコイルの周囲の磁界を変化させること。もう一つは、磁力線を横切るように導体を磁界中で動かすことである。
どちらの方法も同じ電磁誘導の原理に従う。異なるのは磁束変化の物理的な源である。変圧器では交流によって磁界が変化し、発電機では機械的な動きが磁束鎖交を変化させる。
磁界の変化による発生
時間とともに強さが増減する磁界の近くにコイルを置くと、コイルを貫く磁束が変化する。この変化する磁束がコイルに電圧を誘導する。コイル自体は動く必要がない。
この原理は、変圧器、インダクタ、ワイヤレス充電コイル、計器用変流器、電磁ピックアップ、そして多くのセンシングデバイスで利用されている。これらのシステムでは通常、交流や時間変化する磁気源によって変化磁界が作られる。
導体の磁界中での移動による発生
導体が磁界の中を動くと、導体内部の自由電荷が磁気力(ローレンツ力)を受ける。これにより導体に沿って電荷が分離し、電位差が生じる。これを運動誘導起電力と呼ぶ。
誘導される電圧は、磁束密度、導体の長さ、移動速度、そして導体の運動方向と磁界との角度に依存する。導体が磁力線を直角に横切るときに最大の起電力が得られる。
磁界中でのコイルの回転による発生
発電機では一般に回転運動が用いられる。磁界の中でコイルが回転すると、コイル面と磁界との角度が連続的に変化する。これが磁束の変化を生み、交流の起電力を発生させる。
コイルの回転が速いほど磁束の変化も速くなり、発電機の設計に応じて発生電圧と周波数が増加する。これが多くの交流発電機やオルタネータの基礎である。
レンツの法則の役割
レンツの法則は、誘導起電力と誘導電流の向きを説明する。誘導電流は、それを引き起こした磁束の変化を妨げる向きに流れる。これが、ファラデーの法則にマイナス符号が付く理由である。
レンツの法則が示すこの「反発」は偶然ではなく、エネルギー保存則を反映している。もし誘導電流が元の変化を助ける向きに流れたら、外部からの入力なしにエネルギーが作り出されることになり、物理法則に反してしまう。
方向が重要である理由
方向は、モータ、発電機、リレー、変圧器、誘導ブレーキ、保護回路において重要である。システム設計に対して誤った方向にコイルが起電力を生じると、回路は意図したとおりに動作しない可能性がある。
実際の配線では、極性表示、巻き線方向、端子記号、位相関係のすべてが重要になる。技術者は、コイルや変圧器、発電機、センサを接続する際、誘導起電力の方向を理解していなければならない。
モータにおける逆起電力
モータが回転すると、その巻線が磁界の中を動き、電源電圧に対抗する向きの誘導電圧を発生する。これを逆起電力と呼ぶ。逆起電力は正常動作時の電流を制限し、モータの挙動を特徴づける重要な要素である。
始動時は回転速度が低いため逆起電力も小さい。これにより大きな始動電流が流れることがある。モータが加速するにつれて逆起電力が増加し、巻線に電流を流す正味の電圧が減少する。
計算のための主な公式
誘導起電力は物理的な状況に応じて異なる方法で計算できる。最も一般的な公式はファラデーの法則である。磁界中を動く直線導体の場合は、運動誘導起電力の公式がより便利なことが多い。
計算の前に、問題がコイルを貫く磁束の変化、磁界中を動く導体、あるいは回転するコイルのいずれを含むかを特定する。それから状況に合った公式を選ぶ。
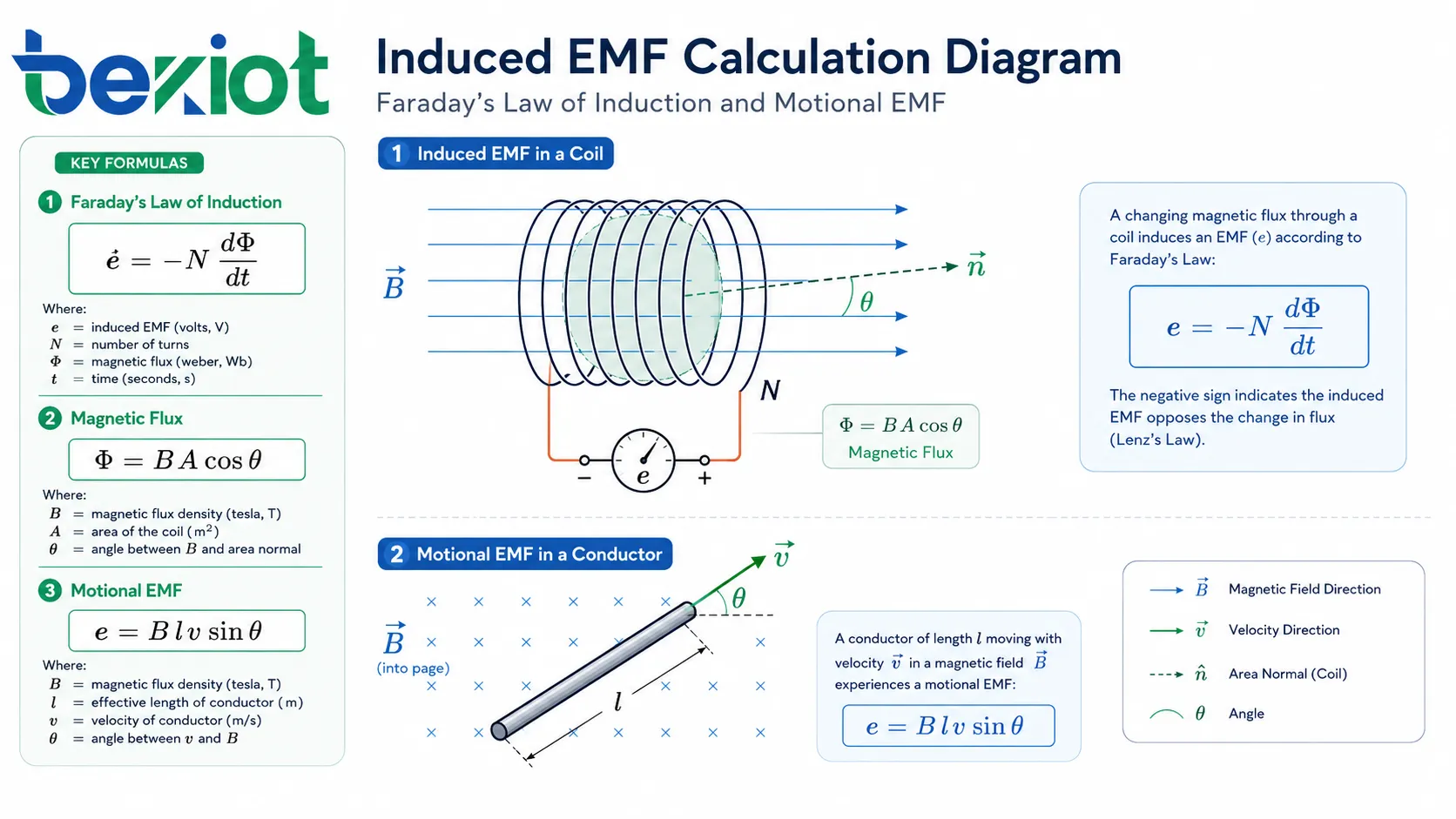
コイルに関するファラデーの法則
一般式は次のとおりである:
ε = -N × ΔΦ / Δt
この式で、ε は誘導起電力(V)、N はコイルの巻き数、ΔΦ は磁束の変化量(Wb)、Δt は時間間隔(s)である。マイナス符号はレンツの法則を表し、誘導起電力が磁束の変化を妨げる向きに生じることを示す。
多くの実用的な計算では大きさ(絶対値)を用いる:
|ε| = N × |ΔΦ| / Δt
磁束の公式
磁束は次のように計算される:
Φ = B × A × cosθ
ここで、Φ は磁束(Wb)、B は磁束密度(T)、A は面積(m²)、θ は磁界とコイル面の法線(垂直方向)との間の角度である。
磁界がコイル面に垂直な場合、磁束は最大になる。磁界がコイル面に平行な場合、コイル面を貫く磁束はゼロになる。
運動誘導起電力の公式
磁界中を動く直線導体に対しては、次の公式がよく用いられる:
ε = B × l × v × sinθ
この式で、B は磁束密度(T)、l は有効導体長(m)、v は速度(m/s)、θ は運動方向と磁界との間の角度である。導体が磁界に対して垂直に動く場合、sinθ = 1 となり、ε = B × l × v に簡略化される。
| 記号 | 意味 | 一般的な単位 |
|---|---|---|
| ε | 誘導起電力 | ボルト (V) |
| N | コイルの巻き数 | ターン(回) |
| Φ | 磁束 | ウェーバ (Wb) |
| B | 磁束密度 | テスラ (T) |
| A | 磁界が鎖交する面積 | 平方メートル (m²) |
| l | 導体の有効長 | メートル (m) |
| v | 導体の速度 | メートル毎秒 (m/s) |
| t | 時間 | 秒 (s) |
段階的な計算例
物理過程を明確に特定できれば計算は容易になる。最初の例はコイルに対するファラデーの法則、二番目の例は動く導体に対する運動誘導起電力の公式を用いる。
例1:変化する磁束中のコイル
200回巻きのコイルがある。各ターンを貫く磁束が0.5秒間に0.06 Wbから0.02 Wbへ変化する。平均の誘導起電力はいくらか?
磁束の変化量は:
ΔΦ = 0.02 - 0.06 = -0.04 Wb
変化の大きさは 0.04 Wb である。ファラデーの法則を用いると:
|ε| = N × |ΔΦ| / Δt = 200 × 0.04 / 0.5 = 16 V
平均の誘導起電力は 16ボルト となる。実際の極性は、レンツの法則に従い、磁束変化の向きと巻き線方向に依存する。
例2:磁界中を動く導体
有効長0.5 mの直線導体が、0.8 Tの磁界中を3 m/sの速度で動いている。運動方向は磁界に対して垂直である。誘導起電力はいくらか?
導体が磁界に垂直に動くため、sinθ = 1 である。計算は:
ε = B × l × v = 0.8 × 0.5 × 3 = 1.2 V
誘導起電力は 1.2ボルト になる。もし導体が垂直ではなく角度をもって動いたなら、sinθ が1より小さくなるため、結果はより低くなる。
例3:磁界、面積、角度から磁束を求める
面積0.02 m²のコイルが0.5 Tの磁界中に置かれている。磁界はコイル面に垂直である。コイルを貫く磁束はいくらか?
磁界がコイル面に垂直なとき、磁界と面の法線との角度は0度なので、cos0° = 1 である。磁束は:
Φ = B × A × cosθ = 0.5 × 0.02 × 1 = 0.01 Wb
もしこの後で磁束が変化したなら、その時間変化にファラデーの法則を適用することで誘導起電力を計算できる。
誘導電圧に影響を与える要因
誘導起電力は、いくつかの物理的・設計的要因の影響を受ける。これらの要因を理解することで、技術者は出力を予測しやすい発電機、変圧器、センサ、誘導機器、電磁システムを設計できる。
磁束の変化率
磁束の変化が速いほど、誘導起電力は大きくなる。同じコイルでも、ゆっくり動く磁石より速く動く磁石の方が高い電圧を生み出せるのはそのためである。
交流システムでは、周波数が高いほど磁束の変化が速くなるため、誘導電圧に影響する。これは変圧器、交流発電機、誘導電力伝送、電磁センシングにおいて重要である。
巻き数
同じ磁束変化が各ターンに鎖交するとき、巻き数が多いコイルほど高い誘導起電力を発生する。変圧器や発電機が所望の電圧を得るために多数の巻き線を用いるのはこの理由による。
しかし、巻き数が増えると抵抗やサイズ、キャパシタンスが増し、損失が増えることもある。実際の設計では、出力電圧、電流容量、温度上昇、絶縁、物理的スペースのバランスを取らなければならない。
磁界の強さ
他の条件が同じなら、磁界が強いほど多くの磁束を生み、したがって誘導起電力も大きくなる。強力な磁石、優れた磁気コア、最適化されたエアギャップが誘導性能を向上させる。
磁性材料も重要である。適切な鉄心やフェライトコアは磁束を集中させることができるが、実際の機器では飽和、ヒステリシス、渦電流損を考慮しなければならない。
面積と向き
ループの面積と磁界に対する向きは磁束に影響する。より大きなループはより多くの磁束を捉えることができる。最大磁束が得られる向きのループは、磁界が変化したときにより強い起電力を生じる。
回転機では、コイルと磁界の間の角度が変化することこそが交流起電力を生み出している。センサでは、注意深い配置と向きによって信号強度と精度を向上させることができる。
電気・電子システムにおける応用
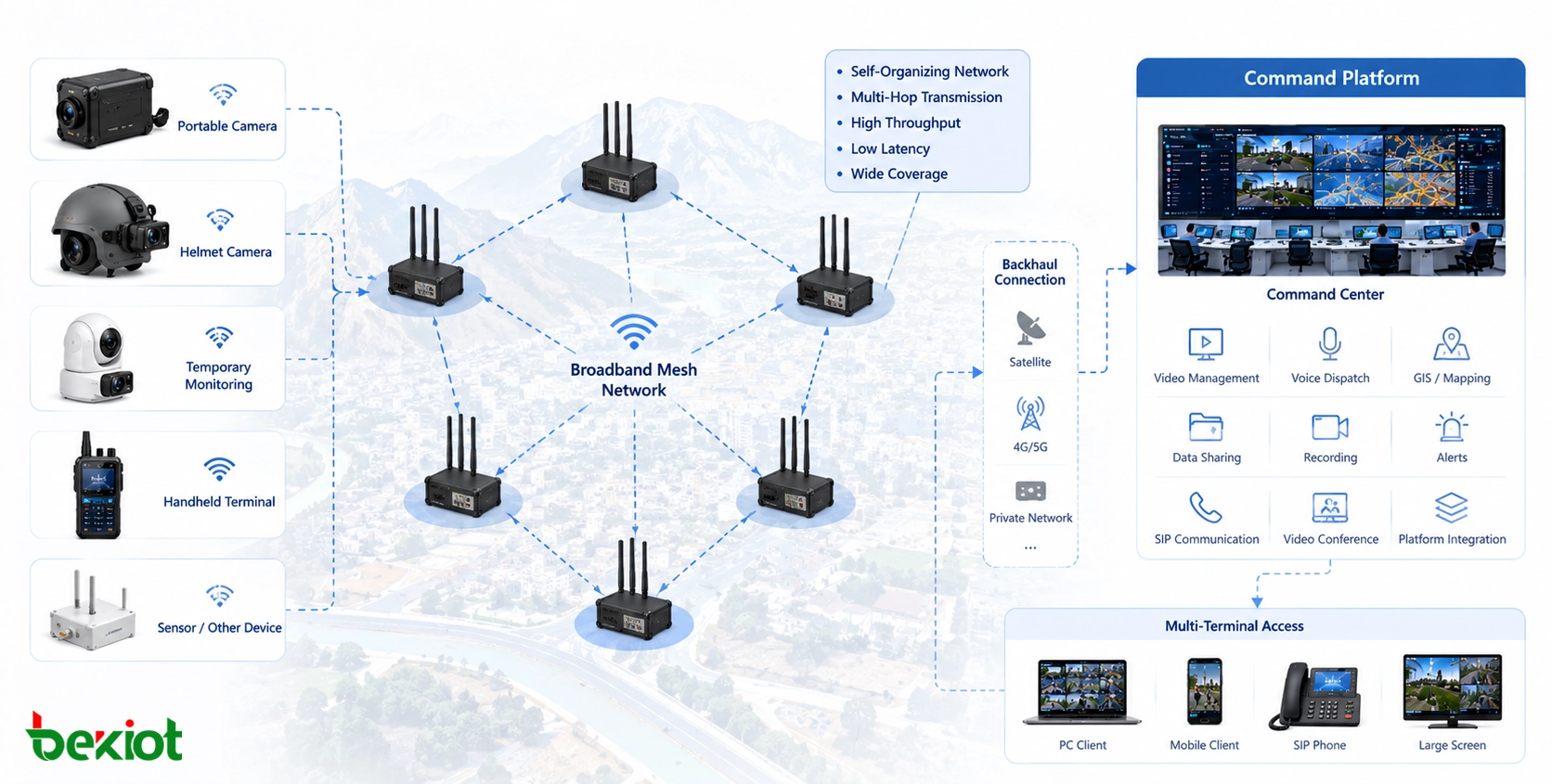
誘導起電力は多くの電気技術の基礎である。それは教室の物理学にとどまらず、発電、エネルギー変換、信号検出、動きのセンシング、ワイヤレス給電、保護システム、電磁両立性解析などに登場する。
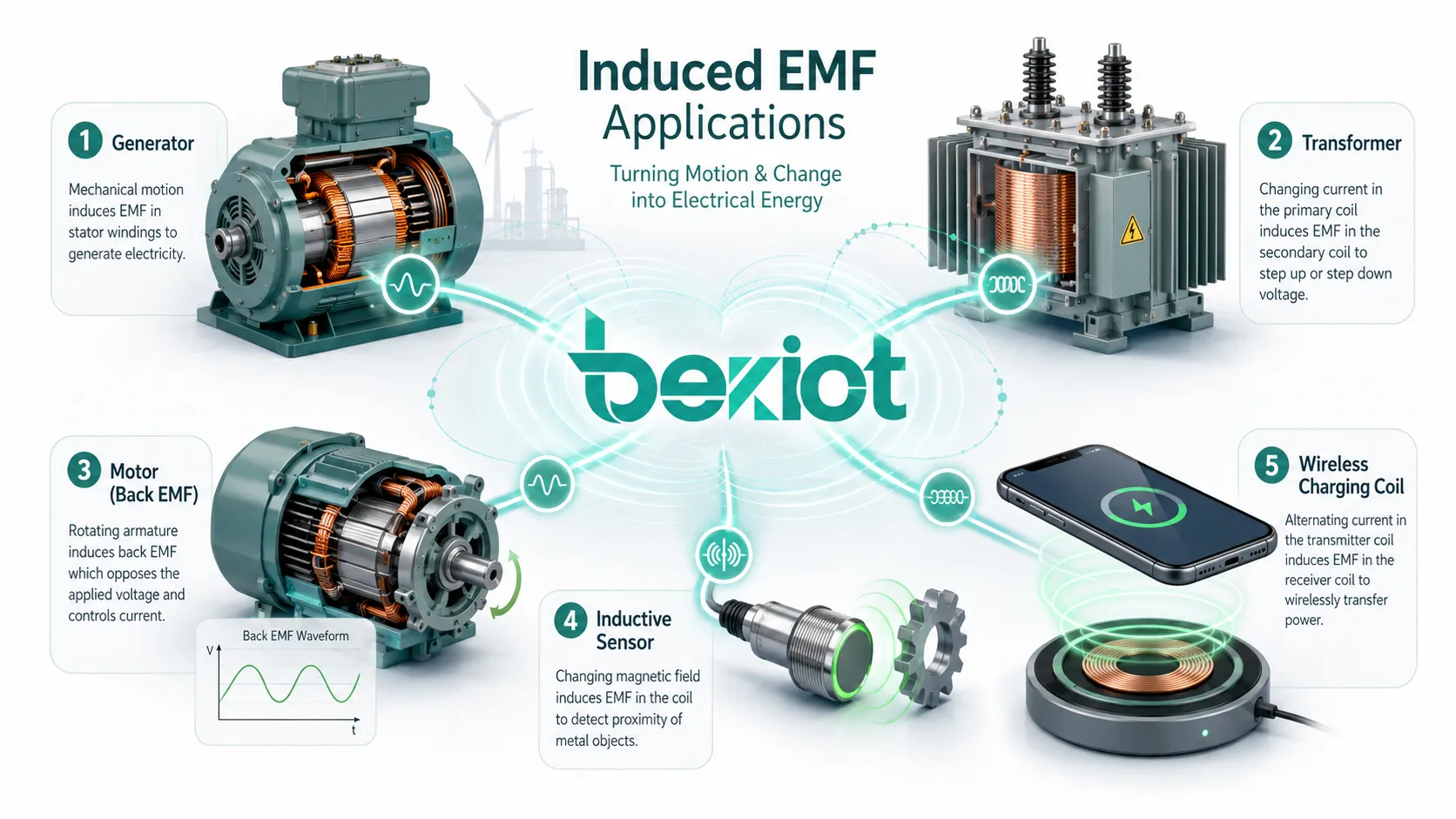
発電機とオルタネータ
発電機は電磁誘導によって機械的エネルギーを電気的エネルギーに変換する。導体またはコイルが磁界に対して相対運動することで磁束鎖交が変化し、起電力が発生する。
大規模発電所では、タービンが発電機の回転子を回して電力を生み出す。より小規模なシステムでは、自動車のオルタネータ、ポータブル発電機、自転車のダイナモが、それぞれ異なるスケールで同じ基本原理を利用している。
変圧器と電力変換
変圧器は、変化する磁界を介して巻線間でエネルギーを伝送するために誘導起電力を利用する。一次巻線の交流がコア内に変化する磁束を作り、それが二次巻線に電圧を誘導する。
電圧比は主に一次と二次の巻数比に依存する。そのため変圧器は、配電、充電器、アダプタ、絶縁回路、オーディオシステム、産業機器に不可欠である。
モータと逆起電力
電動機は回転中に逆起電力を発生する。この誘導電圧は印加された電源電圧に対抗し、モータ電流、速度制御、効率、制御特性に影響を与える。
モータドライブはしばしば逆起電力の情報を制御に利用し、特にブラシレスDCモータやセンサレス制御システムで顕著である。逆起電力を理解することは、より安全で効率的なモータシステムの設計に役立つ。
センサと測定器
誘導型センサ、磁気ピックアップ、変流器、タコメータ、金属探知機、一部の流量計は誘導起電力を利用している。これらのデバイスは、動き、位置、電流、磁気の変化を電気信号に変換する。
誘導電圧が動きや磁界変化に依存するため、こうしたセンサは非接触測定、回転機械の監視、速度検出、産業オートメーションで有用である。
ワイヤレス充電と誘導電力伝送
ワイヤレス充電は、変化する磁界を使って受電コイルに電圧を誘導する。送電コイルが交流磁界を作り、受電コイルがその変化磁束の一部を電気エネルギーに変換する。
効率はコイルの位置合わせ、距離、周波数、磁気設計、負荷状態、制御電子回路に依存する。位置ずれや距離が大きすぎると誘導電圧が低下し、損失が増える。
設計と測定に関する実務上の注意
実際のシステムでは、誘導起電力は非理想的な条件の影響を受ける。抵抗、漏れ磁束、コア損失、渦電流、キャパシタンス、温度、負荷電流、波形形状、機械的公差のすべてが測定電圧に影響を与えうる。
開回路電圧と負荷時電圧
ファラデーの法則から計算される誘導起電力は、多くの場合、内部降下や負荷の影響を考慮する前の発電電圧を表している。負荷が接続されると電流が流れ、端子電圧は開路起電力よりも低くなることがある。
これは発電機、変圧器、バッテリ、センサでよく見られる。技術者は、発生した起電力と動作負荷時の実際の端子電圧を区別しなければならない。
渦電流と損失
変化する磁界は導電性材料に循環電流を誘導することがある。これを渦電流と呼ぶ。渦電流は、変圧器のコア、モータのコア、発電機の積層鉄心、周辺の金属構造物に発熱とエネルギー損失を引き起こす。
渦電流損を減らすため、磁気コアはしばしば積層されたり、電気抵抗率の高い材料で作られたりする。高周波用途では、特定の損失メカニズムを低減するためにフェライトコアも使用される。
計器による測定
誘導起電力は、電圧計、オシロスコープ、データ収集システム、専用の分析器で測定できる。適切な計器は、信号レベル、周波数、波形、信号源インピーダンス、そして電圧が一定かパルス状か交流かによって異なる。
高速に変化する信号には、波形形状、ピーク値、タイミング、過渡応答を表示できるオシロスコープが単純なマルチメータよりも有用なことが多い。正弦波交流には通常、実効値(RMS)電圧が用いられる。
計算時によくある誤り
誘導起電力の計算における誤りの多くは、磁束、磁界、面積、角度を混同することから生じる。コイルの巻き数を無視したり、磁束の変化に対して誤った時間間隔を使ったりすることもよくあるミスである。
磁束ではなく磁界の強さを用いてしまう
ファラデーの法則は磁束を使うものであり、磁界の強さだけを用いるのではない。問題に磁束密度、面積、角度が与えられている場合は、まず Φ = B × A × cosθ で磁束を計算する。
磁束がわかって初めて、その時間変化を誘導起電力の計算に使うことができる。このステップを飛ばすと、誤った単位や間違った結果を招く。
方向と極性を無視する
大きさだけが問われている場合は、ファラデーの法則のマイナス符号を省略してもよい。しかし、方向や極性が問われているなら、レンツの法則を考慮しなければならない。
方向は、磁界の向き、コイルの巻き方向、運動の方向、そして磁束が増加しているか減少しているかに依存する。正確な極性解析には図が必要になることが多い。
ピーク値、平均値、実効値の混同
交流の誘導起電力は、ピーク電圧、平均電圧、実効値(RMS)電圧として記述されうる。これらは同じではない。RMSは実際の交流電力計算によく使われ、ピーク値は波形解析でよく使われる。
発電機、変圧器、センサの仕様を比較する際は、どの電圧値が、どのような動作条件の下で記載されているかを常に確認すべきである。
よくある質問
誘導起電力とは何ですか?
誘導起電力とは、導体やコイルと鎖交する磁束が変化するときに生じる電圧のことです。変化する磁界、動く導体、磁界中で回転するコイルによって発生させることができます。
誘導起電力の計算にはどの法則を使いますか?
誘導起電力の計算にはファラデーの法則を用います。一般的な公式は ε = -N × ΔΦ / Δt で、N はコイルの巻き数、ΔΦ は磁束の変化量、Δt は時間間隔です。
ファラデーの法則にマイナス符号が付くのはなぜですか?
マイナス符号はレンツの法則を表しています。誘導起電力が、それを引き起こした磁束の変化を妨げる向きに働くことを示しており、これはエネルギー保存則を反映しています。
運動誘導起電力はどのように計算しますか?
運動誘導起電力は通常 ε = B × l × v × sinθ で計算します。導体が磁界に対して垂直に動く場合、ε = B × l × v となります。
誘導起電力は常に電流を生じさせますか?
いいえ。誘導起電力が生み出すのは電圧です。電流は閉じた導電経路があって初めて流れます。開回路では端子間に電圧が存在しても、持続的な電流は流れません。
誘導起電力は実際のシステムのどこで使われていますか?
誘導起電力は、発電機、オルタネータ、変圧器、モータ、誘導型センサ、変流器、ワイヤレス充電システム、磁気ピックアップ、その他多くの電磁測定器で利用されています。